

Treiber für neues CONRAD-USB-Interface K8061 verfügbar
Bereits verfügbar ist der BORIS-Treiber für das neue USB-Interface K8061 der Fa. Velleman, das bei CONRAD-Elektronik (www.conrad.de) zum Preis von etwa 100,- EUR erhältlich ist.

Fuzzy-Bräu Kleinbrauanlage der HTL-Salzburg
Fuzzy-Bräu heißt die Kleinbrauanlage der HTL-Salzburg für 25 Liter Sudmenge, welche mit BORIS unter WinFACT automatisiert werden konnte. Wie in den meisten Fällen standen auch hier geringe Kosten als Entwicklungsziel im Vordergrund.
Das System besteht aus einem Industrie-PC, einer USB-Box (LabJack U12), einem leistungs-elektronischen Steuergerät mit Paketsteuerung für den Sudkessel, Phasenanschnittsteuerung für das Rührwerk und Schaltfunktionen für Kühlaggregat, diverse Pumpen und Magnetventile. Ferner werden Messsignale für Temperatur, Drehzahl und Füllstand an die USB-Box zurückgeführt. Links stehendes Bild zeigt den Prozessteil Maischen und Würzekochen der Brauanlage.
Dem Braurezept entsprechend muss ein spezielles Temperaturprofil abgearbeitet werden, welches als File in BORIS eingelesen wird. Um die geforderten Temperaturen möglichst rasch zu erreichen und einen möglichst überschwingungsfreien Betrieb zu gewährleisten, wurde ein adaptiver Sliding-Mode Controller implementiert. Unten stehendes Bild zeigt das Soll-, Ist-Temperaturprofil sowie das zugehörige Schaltsignal des Reglers. Der Einbruch der Ist-Temperatur (blauer Verlauf) ergibt sich beim Einmaischen durch die Zufuhr des geschroteten Malzes.
Während des gesamten Prozesses wird unter ständigem Rühren mit konstanten 15 U/min ein Anlegen am Kesselboden vermieden. Dies wird durch eine handelsübliche Bohrmaschine mit nachgerüstetem Drehzahlsensor und einem unter BORIS implementierten PI-Drehzahlregler realisiert. Zum Abpumpen werden Laugenpumpen und zum Absperren Magnetventile aus der Heizungstechnik eingesetzt.
Übrigens konnte die Projektgruppe der HTL-Salzburg ihr Selbstgebrautes bei der österreichischen Staatsmeisterschaft der Kleinbrauer in der Kategorie Märzen auf Anhieb auf Platz 13 von 36 hieven (siehe www.bierig.org).
Applikationsberichte BORIS-AutoCode-Generator
Im Fachbereich Maschinenbau der Fachhochschule Bochum (Prof. Dr. Michael Pohl) wird der BORIS-AutoCode-Generator bereits seit einigen Jahren erfolgreich zur Realisierung von Mechatronik-Projekten wie beispielsweise einem pneumatischen Bewegungssitz eingesetzt. Einige Applikationsberichte dazu stehen nunmehr zum Download bereit.
Softwarebus LabMap®
Die Beibehaltung hoher Produktqualität in immer kürzeren Innovationszyklen stellt immer höhere Anforderungen an Anbieter von Dienstleistungen und Gütern aus allen technischen Bereichen. Das oberste Ziel ist es, trotz dieser hohen Anforderungen die Fertigungskosten zu minimieren. Ein Prozessoptimierungstool zusammen mit einem Systemintegrationstool ist die ideale Lösung, um die Fertigungskosten signifikant zu reduzieren.
Mit den Werkzeugen WinFACT (Ingenieurbüro Dr. Kahlert, Hamm) und LabMap (cbb software GmbH, Lübeck) ist eine solche Lösung auf dem Markt verfügbar.

WinFACT Robotics für ASURO-„Volksroboter“
WinFACT überstützt nun auch den am Deutschen Zentrum für Luft- und Raumfahrt (DLR) entwickelten Miniroboter ASURO, der von der Firma AREXX gebaut und in Deutschland von z. B. CONRAD-Elektronik für unter 50 Euro (incl. C-Compiler und Flash-Tool) vertrieben wird. Damit ist eine komfortable Programmierung des Roboters aus der BORIS-Entwicklungsumgebung möglich, ohne selbst eine einzige Zeile Code schreiben zu müssen.

Analyse-Software zur cerebrovaskulären Diagnostik
In Zusammenarbeit mit dem der Justus-Liebig-Universität angegliederten TransMIT-Projektbereich für cerebrovaskuläre Diagnostik unter der wissenschaftlichen Leitung von Dr. Bernhard Rosengarten wurde nunmehr nach mehrjähriger Entwicklungszeit das Programm VascoChecker fertiggestellt. Dieses Auswerteprogramm erlaubt beispielsweise eine Früherkennung von Diabetes mellitus oder Migräneanfälligkeit auf Basis von Dopplerflusskurven.
WinFACT® Robotics Edition für LEGO Mindstorms
Vergleichbar mit der elektrischen Eisenbahn repräsentiert auch das LEGO-System ein „Spielzeug“, welches sowohl technikbegeisterte Kinder und Jugendliche als auch Erwachsene bis ins hohe Alter immer wieder fasziniert.
BORIS-Simulatorkopplungen
Für das blockorientierte Simulationssystem BORIS stehen jetzt Schnittstellen in Form von User-DLLs sowohl zum Mechatronik-Simulationssystem ITI-SIM (ITI GmbH Dresden) als auch zum Mehrkörper-Simulationssystem ALASKA (Institut für Mechatronik an der TU Chemnitz) zur Verfügung. Damit können Modelle (z. B. von mechanischen Komponenten), die mit einem dieser Simulationssysteme entworfen wurden, direkt als Block in BORIS eingebunden werden. Dort kann dann z. B. ein übergeordneter Regler entworfen und die Simulation des Regelkreises durchgeführt werden.
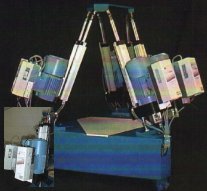
Handlings-Parallelroboter „Handlex“
Die Entwickler um Prof. Dr.-Ing. Pohl des Fachbereichs Mechatronik und Maschinenbau der FH Bochum machten es sich zur Aufgabe, einen sehr kostengünstigen Parallelroboter zu bauen. So kommen in den Bereichen Aktoren, Sensoren, Software und Steuerung nur solche Komponenten zum Einsatz, die auf dem Markt in großen Stückzahlen vorhanden sind. Der Parallelroboter kann in seinen statischen und dynamischen Fähigkeiten nicht mit den „teuren Brüdern“ mit Elektroservoantrieb oder mit Hydraulikaktoren konkurrieren. Aber aufgrund der kompakten Bauweise, der einfachen Installation sowie der hohen Tragkraft sind vielfältige Einsatzmöglichkeiten denkbar.
Das Mechatronikzentrum NRW der Fachhochschule Bochum demonstriert mit diesem Prototyp seine Kompetenz in der Entwicklung komplexer mechanischer Systeme.
Die Steuerung wurde mit Hilfe eines PCs unter WINDOWS 3.11 und der Simulations-Software WinFACT realisiert.

Formel-1-Simulator der FH Bocholt
Weltpremiere feierte der erste Formel-1-Simulator, der im High-Tech-Labor von Prof. Ossendoth im Fachbereich Mechatronik an der FH in Bocholt entwickelt wurde. Im Gegensatz zu normalen Computersimulationen befindet sich das Fahrer-Cockpit bei diesem Simulator auf einer PC-gesteuerten Bewegungsplattform, die sämtliche auf einen Formel-1-Fahrer wirkenden Bewegungskräfte auch an den Testfahrer im Simulator weitergibt. Die komplette Steuerung wurde mit Hilfe eines Pentium-PCs, einer Standard-A/D-D/A-Karte und WinFACT 98 realisiert.
