

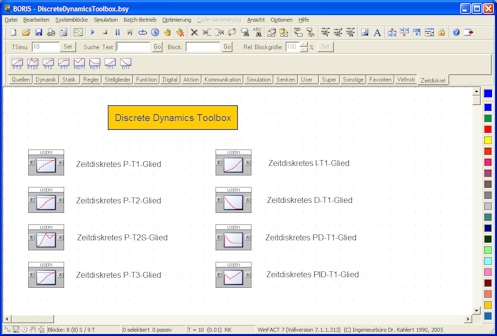
Discrete Dynamics Toolbox für BORIS
Mit der Discrete Dynamics Toolbox für das blockorientierte Simulationssystem BORIS steht dem Anwender eine Sammlung zeitdiskreter Blöcke zur Simulation von Abtastregelkreisen zur Verfügung (Screenshot). Die Toolbox kann kostenlos im Downloadbereich heruntergeladen werden.
BORIS am WAGO I/O-System 750
Ab sofort ist ein Treiber verfügbar, der eine Kommunikation zwischen BORIS und dem modularen I/O-Feldbussystem der Fa. WAGO Kontakttechnik ermöglicht. Der Datenaustausch erfolgt über ETHERNET TCP/IP. Weitere Software ist nicht erforderlich. Für Einsteiger in dieses System bietet die Firma WAGO ein preisgünstiges Starter-KIT an. Mehr …
BORIS-Treiber für Velleman K8055 und AVR-NET-IO kostenlos
Die BORIS-Treiber für das K8055 Interface Board der Fa. Velleman und das AVR-NET-IO-Modul können ab sofort kostenlos aus dem Download-Bereich heruntergeladen werden.
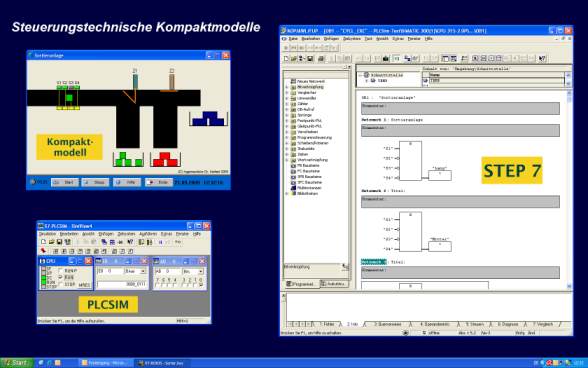
Virtuelle Anlagenmodelle & PLCSIM (V5.4)
Unsere Virtuellen Anlagenmodelle für die Automatisierungstechnik lassen sich mit Hilfe unseres S7-Treibers für WinFACT nunmehr auch über den SIEMENS SPS-Simulator PLCSIM (V5.4) betreiben. Damit steht neben dem Einsatz der Modelle auf Basis der integrierten, in AWL programmierbaren Soft-SPS ein alternativer Weg zur Verfügung, auch ohne Vorhandensein einer realen SPS Steuerprogramme für eine S7 zu entwickeln und zu testen – und zwar in sämtlichen Programmiersprachen, die von STEP 7 unterstützt werden.
Generierung von SPS-Code mit BORIS
Der BORIS-AutoCode-Generator steht nunmehr auch für die SPS-Programmiersprache SCL (Structured Control Language) bzw. ST (Strukturierter Text) zur Verfügung. Damit lassen sich mit BORIS aufgebaute und erprobte Steuerungen oder auch Regelungen direkt in auf der SPS ablauffähigen Programmcode überführen.
OPC-Ankopplung an Siemens-Prozesssimulation SIMIT aus BORIS heraus
Die OPC Client/Server Toolbox für BORIS lässt sich auch einsetzen, um mit SIMIT erstellte Prozessmodelle aus BORIS heraus zu steuern oder zu regeln. Ein Beispiel zeigt, wie es gemacht wird. Mehr …
Buch-Neuerscheinung: „Einführung in WinFACT“
Anfang Juni erscheint im Hanser-Verlag unter dem Titel „Einführung in WinFACT“ eine Einführung in die Arbeit mit WinFACT. Das Buch eignet sich ideal als Ergänzung zur Standard-Programmdokumentation und enthält eine Fülle von Beispielen, Anregungen und Übungsaufgaben mit Musterlösungen.
Das Buch ist erhältlich u. a. bei amazon.de.
Neue BORIS-Treiber: LabJack U3 & AVR-NET-IO
Die Treiber-Palette für BORIS wurde um Treiber für zwei kostengünstige Module ergänzt:
- Das LabJack U3 (www.labjack.com) ist der „kleine“ Bruder des beliebten LabJack U12 und besitzt 4 analoge Eingänge, einen analogen Ausgang sowie bis zu 20 digitale I/Os und zwei Zähler. Es wird am USB-Port betrieben.
- Das AVR-Net-IO-Modul ist ein extrem preisgünstiges Modul (EUR 19,95 als Bausatz, www.pollin.de), das wahlweise an der Ethernet-Schnittstelle oder am COM-Port betrieben werden kann. Es besitzt 4 analoge Eingänge, 4 digitale Eingänge und 8 digitale Ausgänge.
Der BORIS-Treiber für das AVR-Net-IO-Modul kann kostenlos aus dem Download-Bereich heruntergeladen werden.
State Machine Workbench ab sofort verfügbar
Ab sofort verfügbar ist unsere „State Machine Workbench“, das BORIS-Add-On zum Entwurf und zur Simulation von Zustandsautomaten. Mehr …
Neuer S7-Treiber für BORIS
Ab sofort steht ein neuer, einheitlicher S7-Treiber für BORIS zur Verfügung, der nicht mehr die PRODAVE-DLL von Siemens benötigt. Der Treiber eignet sich für die komplette S7-Baureihe, also sowohl die S7-200 als auch die S7-300/400. Eine Demo-Version mit einer begrenzten Laufzeit von zwei Minuten steht im Download-Bereich zur Verfügung. Mehr …
