

Below you find a set of files for free downloading. All files are packed (ZIP-files resp. self extracting EXE-files). If special instructions are necessary for the usage of the files, these instructions can be found within the README.TXT file after extraction.
WinFACT / Automatic Control Compact Models
Demo Versions
| ewf10demo.exe | WinFACT 10 (trial version) as at August 16th, 2022 |
| ewf2016demo.exe | WinFACT 2016 (trial version) as at April 4th, 2017 |
| ewf8demo.zip | WinFACT 8 (trial version) as at August 17th, 2012 |
| e_wf7demo.zip | WinFACT 7 (trial version) as at January 31st, 2007 (incl. documentation) Documentation (separate) as PDF file |
| Driver for H-Tronic HB627/HB628 data acquisition system | |
| wfwagodemo.zip | |
| e_compactmodelsdemo.exe | Demo version of the Automatic Control Compact Models. Note: After the installation of the compact models you invoke them via the Windows start menu (Start | program files | Automatic control models |...), not by loading the corresponding BSY-file in BORIS! |
| tutg.zip | BORIS block which can be parameterized with KP, Tu and Tg. Internally these parametes are automatically transfered into a corresponding P-T2-element. |
| TwoPointController.zip | Two-point-controller with hysteresis for BORIS |
| quantizer.zip | Quantizer resp. A/D-converter block as user-DLL for BORIS |
| BORIS driver for K8055 Interface Board (Velleman) | |
| BORIS driver for AVR-Net-IO-module | |
| BORIS driver for Arduino board |
Free Add-Ons
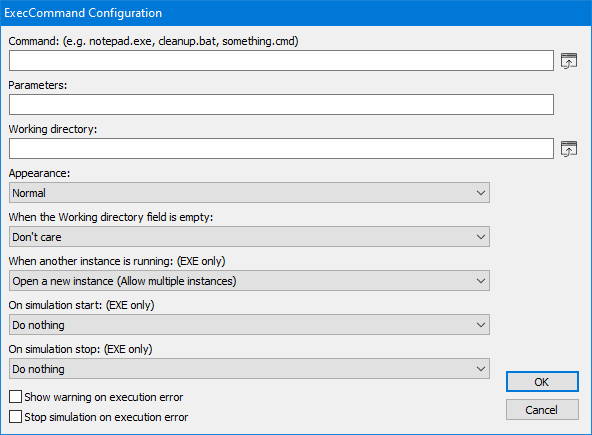
| ExecCommandExt.zip | ExecCommand-User-DLL for BORIS to execute command line instructions with expanded options (Author: K. Lamár, Óbuda University Budapest) (Screenshot) |
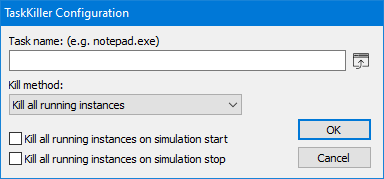
| TaskKillerExt.zip | TaskKiller-User-DLL for BORIS to kill tasks with expanded options (Author: K. Lamár, Óbuda University Budapest) (Screenshot) |
| PyScript.zip | Python script block for BORIS (WinFACT 10) |
| UDPSimulink.zip | BORIS blocks for data exchange with Simulink via UDP |
| friction.zip | Universal friction module for BORIS. The friction model is nonlinear and contains grip-, sliding- and speed-proportional friction parts (algorithm: Dr. W. Seide). It is all-purpose usable in all force and momentum equations. |
| Static characteristics plotter for BORIS (Screenshot) | |
| PIDController.zip | PID-controller for BORIS (representation according to DIN) |
WinFACT Documentation
| WinFACT 7-Complete documentation | |
| ewf7shortdoc.pdf | WinFACT 7-Short Documentation |
Product information about WinFACT and WinFACT Add-Ons
| info_eflyer.pdf | Flyer WinFACT (English) |
| info_fab.pdf | Product information about the Flexible Animation Builder (German) |
| info_softsps.pdf | Product information about the WinFACT-Soft-PLC (German) |
| info_autocode.pdf | Product information about the BORIS-AutoCode-Generator (German) |
| info_statemachineworkbench.pdf | Product information about the WinFACT-State Machine Workbench (German/English) |
| info_opc.pdf | Product information about the OPC-Client/Server-Toolbox for BORIS (German) |
| info_piddesigncenter.pdf | Product information about the PID Design Center for BORIS (German) |
| info_systemIdentificationcenter.pdf | Product information about the System Identification Center for BORIS (German) |
| info_kompaktmodelle.pdf | Product information about the Automatic Control Compact Models (German) |
| info_steuerungsmodelle.pdf | Product information about the Virtual Plant Control Models (German) |
| info_robotics.pdf | Product information about the WinFACT Robotics Editions for LEGO Mindstorms and ASURO (German) |
| info_s7-treiber.pdf | Product information about the WinFACT driver S7-200/300/400 (German) |
| produktuebersicht.pdf | Product information about the Automatic Control Software-Courses (German) |
| info_streckenmodelle.pdf | Product information about the Automatic Control Plant Models for BORIS (German) |
| info_zusatzmodule.pdf | Product information about further add-ons for BORIS (German) |
PowerPoint-presentations of WinFACT, the Flexible Animation Builder and the Soft-PLC
… please visit our media center!
Reports and publications
… please visit our media center!

{kind=link}
{kind=link}