

Scope of performance

Instead of an expensive equipping of laboratories with plant models, function generators, oscilloscopes and measuring instruments we offer our so-called Automatic Control Software Courses. They can be used as a supplement or alternative to conventional experiments within courses and although no hardware is needed they are of great clearness. The software courses are based on the WinFACT education editions and are mainly intended for colleges and universities for applied science. Each course deals with one topic and consists of the following components:
- instructions for experiments (ring binder): introduction to the theoretical background as well as worksheets with detailed tasks and solutions (sample pages in PDF-format, German).
- a set of high-quality acetate sheets for overhead-projection, which show a summary of the main points of the experiments (sample slides in PDF-format, German).
- numerous WinFACT sample files containing tasks and their solutions. All sample files contain extensive control and visualization functions especially for the presentation of plants and controllers. The student almost ‘forgets’ that he isn’t sitting “in a real lab” but “only” simulating with a PC (especially advantegeous regarding operational safety and energy consumption). The following plant models, among other things, are used within the courses (see also WinFACT plant models below on this page):
- temperature plants
- motor-generator-set
- inverted pendulum
- loading crane
- stirring tank
- liquid level plant (one tank system)
- three tank system
- mixed water plant
- spindle drive
- light plant
- aircraft attitude control
- stirring tank cascade
- synchronous motion control
At the moment the following courses (German) are available:
| item no. | courses | required WinFACT components * |
|---|---|---|
| 0801D00xx | Introduction to PID-Control | BORIS, INGO |
| 0802D00xx | Closed loop systems with switching controllers (2-point, 3-point) | BORIS, INGO |
| 0803D00xx | Cascade and state control | BORIS, INGO, SUSY |
| 0804D00xx | Introduction to fuzzy control | BORIS, INGO, FLOP |
| 0805D00xx | Introduction to digital control | BORIS, INGO |
| 0806D00xx | Controller design in frequency range | BORIS, INGO, LISA, RESY |
| Introduction to PLC-programming (in preperation) | Soft-PLC, (BORIS) |
* Requirement for using the automatic control software courses is the existence of the corresponding WinFACT licence (type A, B or C) which comprehends the needed WinFACT components.
Automatic Control Software Courses
This collection includes numerous different plant models for the block oriented simulation system BORIS. Each model consists of the functional block (mathematical plant model as a BORIS superblock) or several alternative functional blocks and the corresponding visualization block (User-DLL-Block) block, which visualizes the dynamic behaviour of the single plant variables graphically. Thus, these courses and plant models are especially suitable in the field of education and training and also as a basis for own process visualizations. All plant models optionally come with source listings and resource files (Pascal/Delphi format), so that own extensions can easily be programmed. A written documentation, of course, is delivered with each package. The following screenshots shows the available plant models (BORIS blocks).
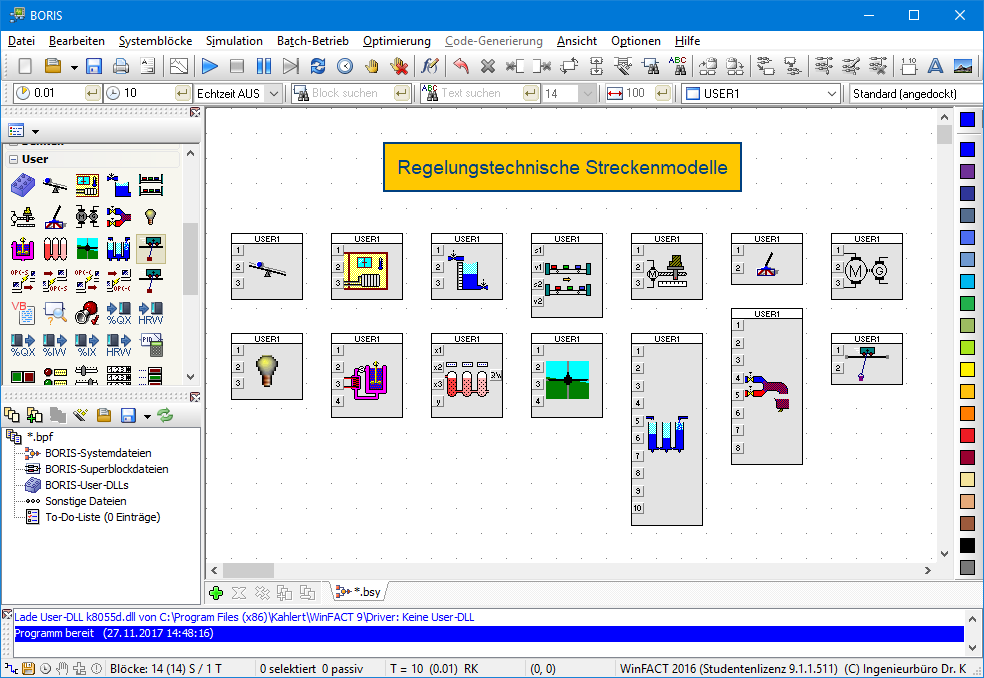
The following table shows the available plant models (German). To start the original animations just click the corresponding graphic preview.
| Graphic preview | Short description |
|---|---|
 | Liquid level plant (one tank system). This plant model represents a single tank shaped like a cylinder with inflow and outflow (plant without compensation, I-plant), of which inflow and outflow current is controlled by an electrical valve. |
 | Temperature plant. At moment there are three different temperature plants to choose from. Each plant model is realized as a series connection of an electrical valve and a room to be heated. Input variable of the plant is the motor voltage, output variable the room temperature T. An additional disturbance can be simulated by a disturbance input. The three types of plants differ in the realization of the valve resp. room model. |
 | Seesaw with ball. This model represents a seesaw 2l long. On this seesaw there is a ball with mass m and radius r, which is to be brought to a setpoint (e. g. centre of the seesaw) by a servo. The servo is driven by the voltage and from that generates an angle Phi. |
| Loading crane. This model represents a loading bridge. A wagon with the mass with a jib l long with the load mass is moved forward by the power F. State variables of the system are the position of the wagon and its speed as well as the angle of the pendulum and its rotation speed. | |
 | Motor-Generator-Set. This plant model represents a motor-generator-set by which a speed control can be realized. Input variable of the plant is the motor voltage, output variables are the generator voltage and the speed. Additionally a disturbance can be simulated by a disturbance input. |
 | Three tank system. This model represents three identical tanks in a row. Each two tanks standing side by side are connected by a pipe with an electrical valve. Additionally each tank has a seperate, also by an electrical valve controllable outflow, which can be used e.g. for the simulation of a leak. The outer tanks can be filled by electrical pumps. This model is especially suitable for the design of multivariable controls or error detection/diagnosis systems. |
 | Mixed water plant. This plant model represents a mixing process. Two liquids with different temperature are mixed up. The inflows of the cold and the warm water are controlled by two electrical valves with the voltage Ucold resp. Uhot. Both volume flows are mixed to a total volume flow with the temperature Tmix and e.g. from there flow into a basin which is to be filled up. |
 | Inverted pendulum. This plant model represents a turned up pendulum, which can be controlled by a torque M proportional to the motor current i generated by a motor. The state variables of the pendulum are the angle and its rotation speed. |
 | Stirring tank reactor. This plant model represents a stirring tank reactor, in which a liquid can indirectly be heated by covering water. The water itself is heated by a heat exchanger, which is brought into contact with a heating medium of the temperature T. The flow rate of this heating medium can be controlled by an electrical valve. Output variables of the system are the temperature of the water in the reactor cope resp. the temperature of the liquid in the tank. |
| Spindle Drive. This plant model represents a spindle drive of a tool machine. The workpiece on the slide can be positioned by a motor driven spindle. Input variable of the system is the voltage of the motor, output variables are its rotation speed and the position of the slide. Besides a disturbance (e. g. an additional load torque) can be simulated via the disturbance input. | |
 | Light Plant. Light controls are realized by this plant model. A lamp in the center of the ceiling illuminates a room. The controlled variable is the brightness in the room, the manipulated variable the power of the lamp. Additive disturbance light shines into the room through a window which can constantly be closed by a blind. |
 | Aircraft attitude control. This plant model represents an aircraft. Its flight attitude is to follow a controlled angle and depends on the thrusts of two engines. The left one is the manipulated variable, by the right one a disturbance can be simulated. Input variables are the thrusts of the two engines, output variables the angular speed and the orientation angle of the aircraft. |
| Stirring tank cascade. This plant model represents a cascade of three stirring tanks which contain a liquid of a certain color concentration (variables x1, x2 and x3). The controlled variable is the color concentration in the third tank (x3). The first tank can be filled by two inflows, the first one contains pure water and can be controlled by a valve. The second inflow adds the colouring. The maximum colouring inflow and the color concentration of the inflow (disturbance z) can be set. The actual inflow (manipulated variable) is regulated by a valve. | |
| Synchronous motion control. This plant model demonstrates a typical synchronous motion control with the example of sychronizing two belts. It is the automatic control task to synchronize the belt below with the belt above in such a way that the positions of both belts correspond to each other (indicated by the boxes on the belts). |
Update August 2025
With immediate effect all automatic control software courses and plant models are only available in digital form (all documents as pdf files on data carrier, there are no more printed documents in ring binders).
Documentations and product information
| Product information “Automatic Control Software Courses” (in product overview, German) | |
| Product information “Automatic Control Plant Models” (German) |
Prices
| Single course (German) | EUR | 150,00 |
| Set of all courses (incl. plant models, excl. DLL-sources; documentation on CD) (German) | EUR | 490,00 |
Please refer to our price lists for current prices of all products!
