

Methods for controller design
WinFACT offers various methods for the design of closed loop systems:
- Design by “rules of thumb” (module BORIS)
- Design by the frequency domain method (module RESY)
- Design by numerical parameter optimization (module BORIS)
- Design of state space systems (module SUSY)
Controller design in frequency domain
The module RESY allows the analysis, design and simulation of linear standard control loops in time domain as well as frequency domain. Controller and plant can be built-up stepwise from linear standard elements. For time domain as well as for frequency domain characteristic values can be determined to get an idea of the dynamic behaviour of the system. The frequency response can be represented as a Bode plot or a Nyquist plot. The following graphic is a typical screenshot during working with RESY.
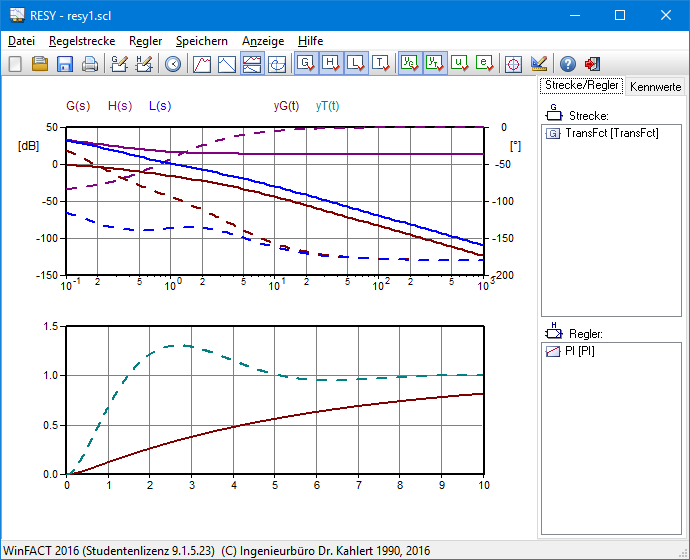
Controller design in frequency domain with RESY
State controller design
The module SUSY serves for the analysis and synthesis of single-input single-output systems in the state space-representation. SUSY can display the time responses of the individual state variables for the analysis, draw trajectories and trajectory fields of state variables and calculate the eigenvalues of the system.For the synthesis two methods are at disposal:
- Riccati-design
- Pole placement
After the synthesis of the state controller time responses, trajectories and eigenvalues of the closed loop can be displayed, if necessary the controller can be optimized or SUSY can generate a document file corresponding to the display. The following graphic is a typical screenshot during working with SUSY.
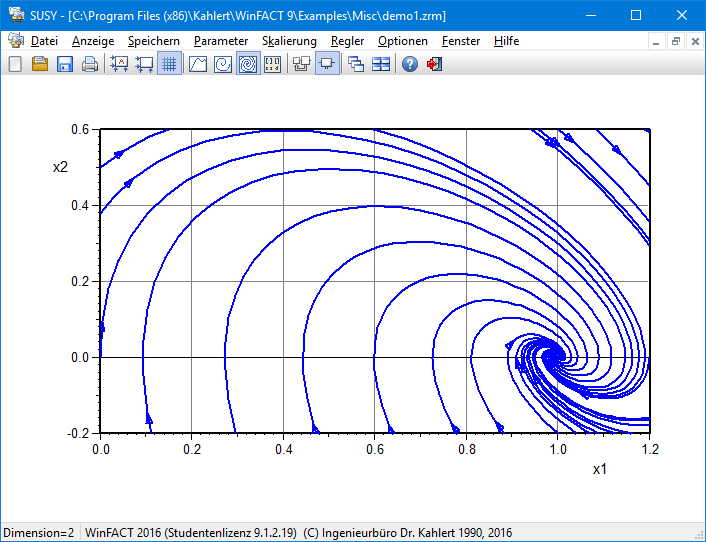
State controller design with SUSY
Downloads
| WinFACT 2016-demo version, as at April 4th, 2017 |
Documentations and product information
| WinFACT 2016-Product overview (German) |
