

Der Motion Trainer – eine innovative Lernumgebung für die Regelungstechnik
An der Hochschule Bochum wurde unter der Leitung von Prof. Dr.-Ing. Michael Pohl mit dem Motion Trainer eine innovative Lernumgebung für die Regelungstechnik-Ausbildung entwickelt. Die Software-Basis für diese Lernumgebung bilden dabei unser blockorientiertes Simulationssystem BORIS und der Flexible Animation Builder FAB.

Eines der wichtigsten Themen in Systemdynamik ist das Verständnis für das Übertragungsverhalten linearer Single-Input-Single-Output-Systeme. Wenn eine Systemvariable geregelt werden muss, z. B. eine Temperatur, dann muss man wissen, in welcher Weise die Temperatur auf die Ansteuerung der Heizleistung reagiert. Gewöhnlich wird dies in der Zeitdomäne mit Differentialgleichungen oder in der Frequenzdomäne mit Übertragungsfunktionen beschrieben. Jedoch ist es meist hilfreich für das Verständnis dieser abstrakten Materie, eine vereinfachte Beschreibung durch die Verwendung der Sprungantwort zu nutzen.
Doch oft haben die Studierenden Verständnisschwierigkeiten aufgrund der Abstraktion und eines Mangels an Vorstellungsvermögen im Alltag. Oft sind auch mangelnde Kenntnisse in fundamentalen physikalischen Prinzipien der Grund. Nach 20 Jahren Lehrtätigkeit in der Regelungstechnik entstand so die Idee für ein Lehrmittel basierend auf Haptik und Visualisierung für lineare und nichtlineare Single-Input-Single-Output-Übertragungsverhalten.
Und das ist die Idee:
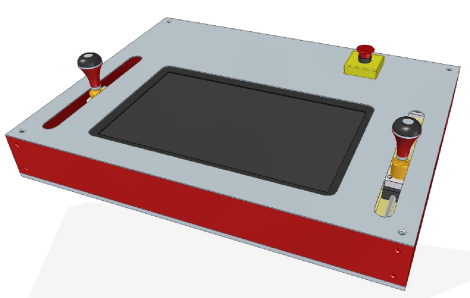
Zwei lineare elektrische Bewegungsachsen sind in Kontakt mit der linken und der rechten Hand des Studenten. Parallel zur Bewegung der Hände visualisiert ein zentraler Touchscreen das Verhalten eines bekannten Alltags-Beispiels. Zum Beispiel kann man die Federung eines Autos fühlen, die sich wie eine PT2-Übertragungsfunktion von der Bordsteinkante an der linken Hand zur Chassis-Schwingung an der rechten Hand verhält.
Der linke dieser Haltegriffe ist in der Lage, Kräfte zu erkennen und die Achse in Form einer Servo-Achse zu bewegen. Es ist daher möglich, den Handgriff entlang der Linearachsen ohne eine Kraft zu bewegen. Im Prozessorsystem werden die Bewegungen mit wählbaren Grundübertragungsverhalten auf dem zweiten Handgriff projiziert.
Die komplette Systembeschreibung können Sie hier herunterladen.

Über den Autor